Robotics & Artificial Intelligence
Search & Rescue
The CRAWLER (also known as TerminatorBot) is a two limbed robot used for urban search and rescue.
[… more]

CompanionBot for Depression
This collaborative research project aims at developing a new class of dialog-based, home robotic healthcare assistants to facilitate a new level of in-home, real-time care to elderly and depressed patients, providing lower total costs and higher quality of life. [… more]

I-Corps Social Robot Customer Discovery
The objective of this project was to interview 100+ potential customers that may use a social robot to address their needs, problems, etc . Our social robot is rear projection humanoid robot with the ability to speak, understand users’ language, their emotion and facial expressions and respond to them verbally and non-verbally. The robot can be used in a variety of applications. [… more]
Computer Vision & Pattern Recognition
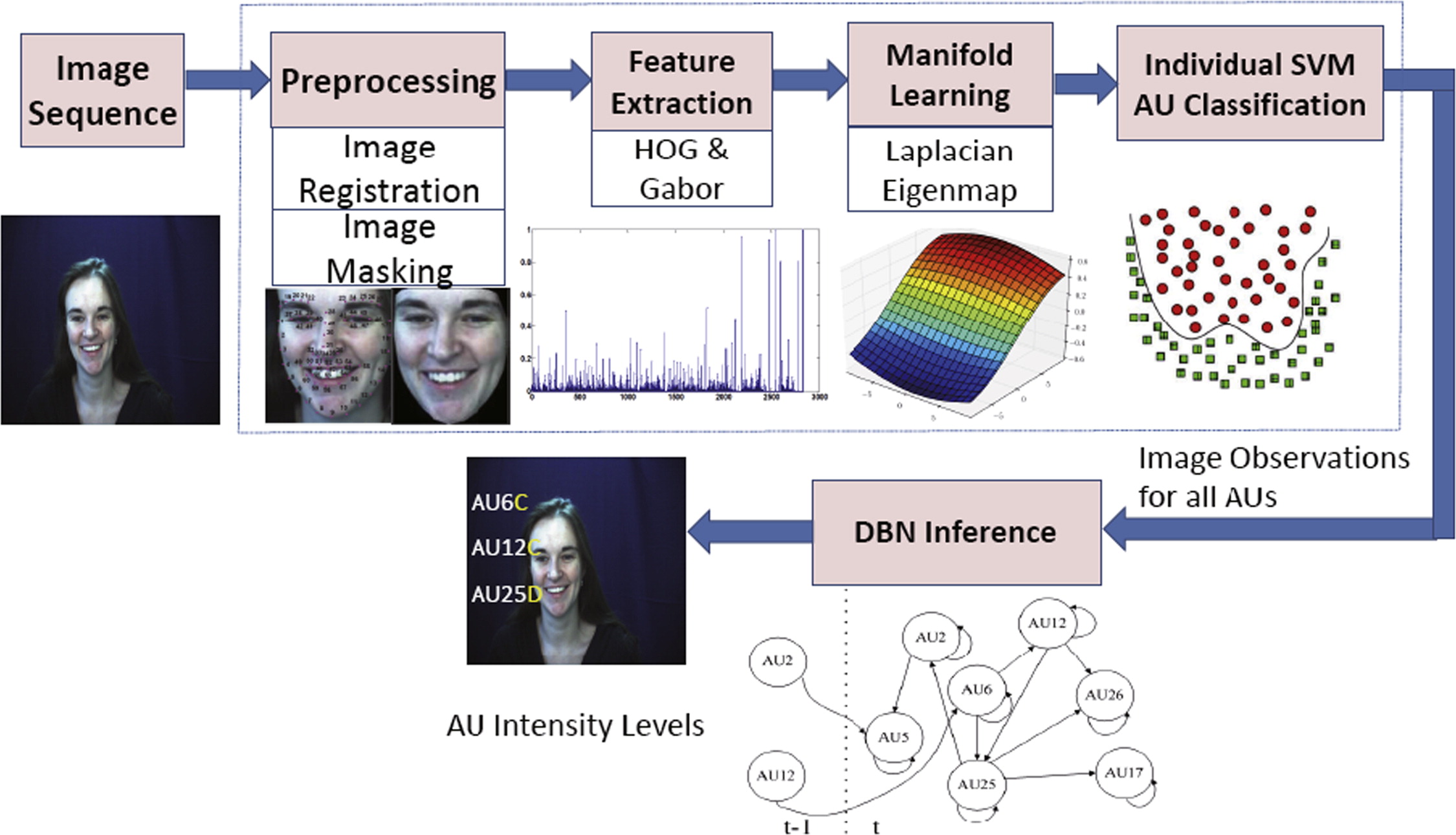
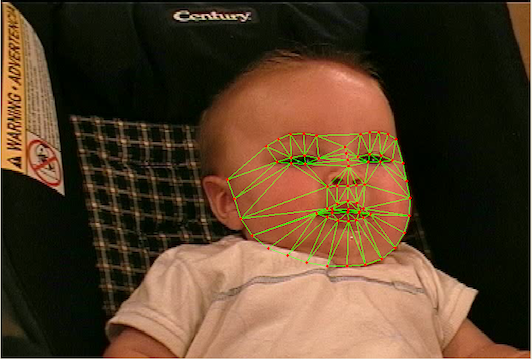
Intensity Measurement of Facial Action Units in Infants
The objective of this project is to use social robots to assist children and adolescences with autism improve their socio-emotional behaviors (e.g. facial expression imitation, eye gaze perception, etc).
[… more]
Facial Landmark Tracking
Active Appearance Model (AAM) is a commonly used method for facial image analysis with applications in face identification and facial expression recognition. This paper proposes a new approach based on image alignment for AAM fitting called bidirectional warping.
[… more]

Video Stabilization
This project is aimed at developing an agile and accurate video stabilization using state-of-the-art computer vision and feature tracking techniques such as Scale Invariant Feature Transform (SIFT). Ultimately the video stabilization algorithm was used in robots that work in harsh environment with applications in search and rescue robotics. [… more]
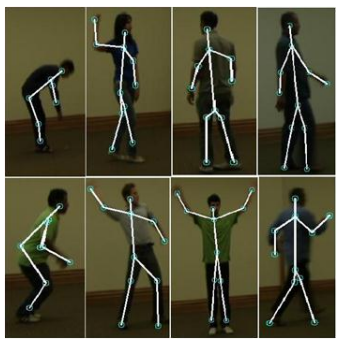
Human Activity Recognition
The objective of this project was to develop computer vision algorithms for human activity recognition in videos. This is a challenging problem in computer vision and our approach has been on utilizing Spherical Harmonics representation or SIFT combined with Multiple Kernel Learning to tackle the problem. [… more]
Bioengineering Systems
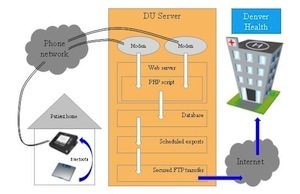
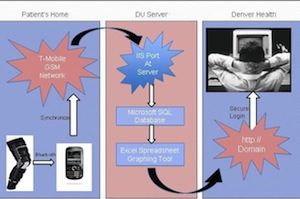
Remote Health Monitoring (Congestive Heart Failure)
The objective of this project was to develop and study the use of a weight monitoring system for reducing the hospitalization of patients with congestive heart failure. This project was done in collaboration between University of Denver and Denver Hospital. It was supported by the Colorado Health Foundation and Caring for Colorado foundation. [… more]
Telemonitoring System for Patients with Total Knee Replacement
The objective of this project was to develop a wearable sensor to measure the knee angle for patients who are recovering from surgery. Such a wearable measurement system would be used at home by patients and would avoid them to visit hospital during the rehabilitation period. [… more]